近日,智能车实验室本科生李柯志在期刊IEEE Transaction on Intelligent Vehicles(简称T-IV)上发表一篇长文,题为Forehead or Headlights-At Which Height Should LiDARs Be Mounted on the Vehicle.

研究背景与意义
在国家政策和科技进步的推动下,越来越多的智能汽车在市场上推出。大多数的智能汽车为了获得冗余的感知信息以实现更安全的智能驾驶,选择在车身装载激光雷达。通过对市面上多款量产车的激光雷达的调研,可以发现其在车身上的安装高度是有明显差异的。
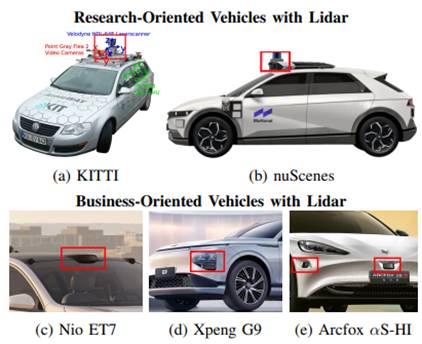
图一,部分量产车型激光雷达安装高度的显著差异,以及和研究用车的对比
对于商用量产车而言,哪一种激光雷达安装高度(位置)是最优选择?不同安装位置对汽车的环境感知能力造成的影响有多大?这些问题鲜有研究,但却十分有价值。
本文工作
不同高度的激光雷达对环境的感知差异可能来源于两个方面。其一、激光雷达的高度不同导致其能检测到的车辆的数量就不同。其二、不同高度的激光雷达采集的点云数据可能因为角度、点的数量而不同,不同的点云数据参与3D目标检测模型训练时可能会造成模型的预测能力有差异。
传统的点云数据集,如KITTI, nuScenes既没有同时用多个不同高度激光雷达采集的数据,也没有场景中所有车辆的真值数据。基于此,该工作采用了carla仿真环境在高速场景上采集了8000帧的车辆点云数据,使用了安装在距离地面高度0.5m, 1.0m, 1.8m的激光雷达同时采集。除了点云和3D检测框,该工作还增加了范围和重要程度这两个指标。范围分为50m, 100m, 150m。重要程度有top3, top6和all。Top3指自车左中右三条车道上各自离自车最近的车辆,Top6则是指左中右三条车道上各自离自车最近的两辆车。通过该数据集,该工作对不同高度激光雷达在量产车上的感知能力进行了综合全面的分析。该数据集已经开源:http://www.kaggle.com/datasets/kezhili/height3。
实验结果
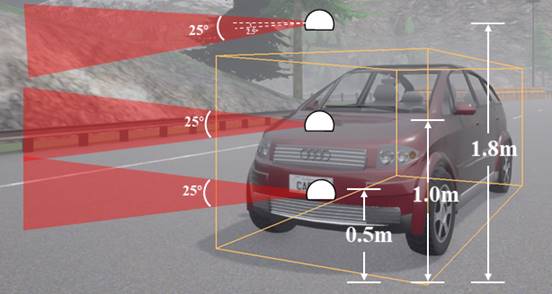
图二,激光雷达安装配置
就对周围汽车的检测而言,最高处的激光雷达展现出了最有竞争力的效果。如图三,1.8m的激光雷达在所有范围内都超过了另外两个高度的雷达。有趣的是,0.5m和1.0m的激光雷达展现出了几乎一致的检测能力,即使他们有0.5m的高度差。然而,如图四所示,1.8m的激光雷达在检测Top3车辆时已经与另外两个雷达表现出了一致的效果。这表明,较低处的激光雷达仍然对最重要的环境车辆有较好的检测效果。
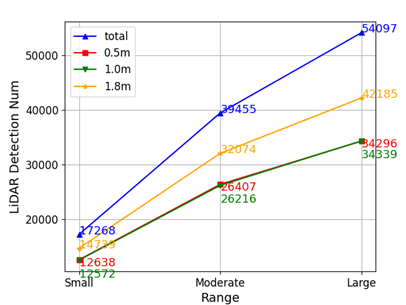

图三,不同高度激光雷达检测车辆随范围的变化 图四,不同高度激光雷达检测车辆随重要性的变化
就其对3D目标检测算法的影响而言,该论文测试了不同表征范式的模型受激光雷达高度的影响。实验表明,大部分算法模型受高度的影响是轻微的。有趣的是,基于点来提取特征的PointRCNN模型在1,8m的点云数据上总会有性能下降。该工作认为这是因为基于点的模型对点的数量比较敏感,而1.8m的激光雷达扫描范围广,造成了每个检测物体中的点数不多,从而影响了模型的性能。
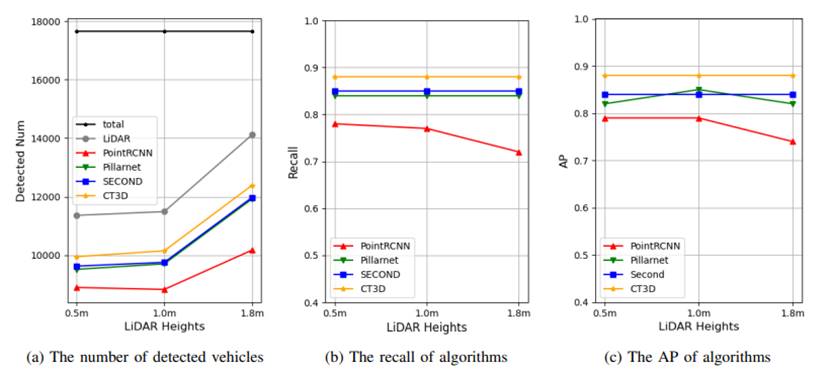
图五,不同算法模型受激光雷达高度的影响。
实验结论
该论文认为,车顶搭载激光雷达感知范围广,无论是被激光扫描的环境车还是算法检测的环境车,绝对数量都是最多的,是激光雷达安装位置的首选。但如果车企因美观或工艺需求,无法安装在车顶,安装在其他位置并不影响对环境中重要车辆的感知,且安装高度对结果影响很小。在算法模型方面,基于点的模型在不同高度的点云数据的训练下的效果有明显的差异,不建议用于不同高度的雷达场景的域迁移工作。
文献引用
Kezhi LI, Yeqiang QIAN, Chunxiang WANG, Ming YANG, Forehead or Headlights – At Which Height Should LiDARs Be Mounted on the Vehicle?, IEEE Transactions on Intelligent Vehicles, DOI:10.1109/TIV.2023.3318628
作者介绍
本文一作李柯志是密西根学院电子与计算机工程专业大四年级学生,在智能车实验室科研期间,曾以第一名成绩成功立项䇹政第十一期项目,获得国家奖学金等奖项。T-IV是智能车领域的顶级期刊,李柯志的这篇文章重点研究当前量产车激光雷达的安装位置对感知算法的影响。