近日,国家自然科学基金委员会公布了2022年国家自然科学基金集中接收申请项目评审结果。上海交通大学智能车实验室3个项目获得了资助,其中杨明教授获得区域创新发展联合基金重点支持项目1项,庄瀚洋博士获得青年基金1项,袁伟博士获得青年基金1项。
杨明教授的获资助项目是《动态干扰环境下园区无人驾驶可靠定位和场景理解方法研究与验证》。该项目针对无人驾驶建图定位方法在高动态干扰下可靠性不足、建图累积误差难以消除、传感器成本较高的瓶颈问题,重点研究基于多模态语义地图的纯视觉定位方法。首先,根据不同模态传感器的特性,对环境进行充分的场景理解,获取视觉语义标签和三维物体动静态信息;结合场景理解的关键语义线索,构建多模态语义地图并消除累积误差;然后,研究基于多模态语义地图的纯视觉定位方法,实现高动态场景下的鲁棒定位;最后,通过实际园区、厂区等应用场景下的实车测试,验证算法的有效性,旨在为无人驾驶产业化应用提供关键理论支撑。
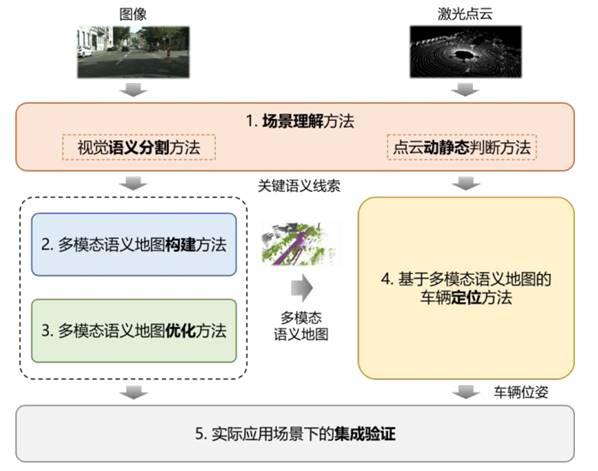
图1 动态干扰环境下园区无人驾驶可靠定位和场景理解方法研究与验证
庄瀚洋博士获资助项目是《面向室内自主代客泊车的场端环境感知方法研究》。该项目通过在停车场内固定安装的传感器,对车辆进行定位并通过无线通信的方式引导车辆前往对应车位,在车辆无需额外传感器配置的情况下实现自主代客泊车功能,将人类从泊车过程中解放出来。本项目围绕其中的场端传感器方案设计、全局标定方法、待泊车辆定位方法和障碍物检测方法四个方面展开研究。

图2 面向室内自主代客泊车的场端环境感知方法研究
袁伟博士获资助项目是《基于虚实迁移的智能车辆端对端学习方法研究》。基于深度学习的端对端驾驶模型受限于真实世界的驾驶数据质量和数量,泛化能力受限,场景处理能力薄弱。为解决以上问题,拟通过仿真器的真值向量进行深度强化学习模型训练,训练出决策性能优异的驾驶模型,将该模型作为专家模型监督端对端驾驶模型的训练,通过迁移学习实现虚实模型迁移,推动端对端驾驶模型在智能车辆中的应用。
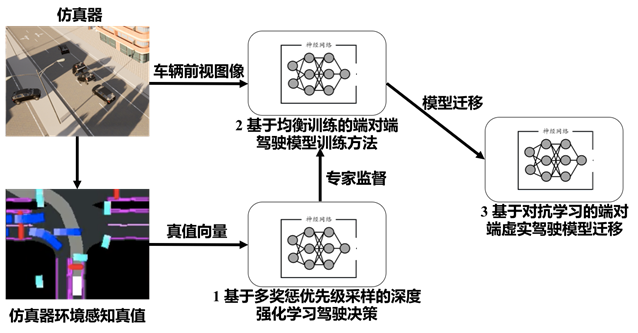
图3 基于虚实迁移的智能车辆端对端学习方法研究