智能车实验室张泽瀚博士在期刊IEEE Robotics and Automation Letters(简称RAL)上发表论文ATF-3D: Semi-supervised 3D Object Detection with Adaptive Thresholds Filtering Based on Confidence and Distance,该论文同时在2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2022)会议上展示。
![Zhang Z, Ji Y, Cui W, et al. ATF-3D: Semi-Supervised 3D Object Detection With Adaptive Thresholds Filtering Based on Confidence and Distance[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 10573-10580.](/__local/1/A5/85/68A9439CC9888E5A96DAFA15381_A08B2BD2_22F4.png)
➢ 研究背景与意义
该工作主要是基于激光雷达的半监督3D目标检测。激光雷达是一种可探测实际三维数据的传感器,它的每一个测量点都有实际的(x, y, z)三维坐标信息,激光雷达每帧包含大量的测量点,通常称之为点云。由于以上特性,基于激光雷达点云的方法可以识别物理空间中的目标并输出带有朝向的3D检测框信息。图1展示了激光雷达点云以及对应的3D框。

图1 激光雷达点云以及对应类别的3D框
虽然学术界已经有大量的点云3D检测的研究工作,但是这些工作主要关注点都在于有监督的方法。在室外点云3D检测领域,几乎没有半监督的方法。由于室外场景,比如自动驾驶场景,积累了大量的无标签数据,因此使用半监督方法充分利用这些无标签数据是非常有必要的。
➢ 本文工作
该工作第一个将半监督方法适配到室外点云3D检测领域,并将伪标签与Mean-Teacher结合,提出了两阶段迭代式的半监督训练方案,如图2所示。
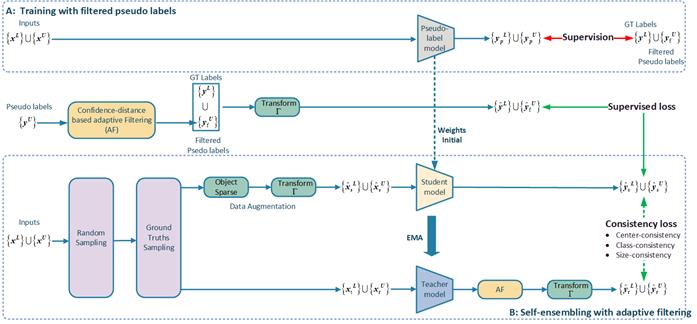
图2 两阶段迭代式半监督训练方案
理论上,半监督方法对于伪标签是非常敏感的,伪标签的噪声越少,半监督方法性能越好。不同类别的点云除了在形态上不同以外,同一个物体在不同距离的点云形态也是有巨大差异的,这主要是由激光雷达自身特性导致的。图3展示了不同类别、不同距离物体的点云形态。不同的点云形态会导致伪标签的置信度分布不同,因此需要不同的阈值进行过滤。该工作另一个贡献点在于提出了一种简单有效地寻找不同距离不同类别置信度阈值的方式:在不同的距离区间,保留一定比例的正检,去除一定比例的误检。通过以上方式,可以快速有效地得到不同距离不同类别的置信度阈值,进而过滤伪标签中的噪声。
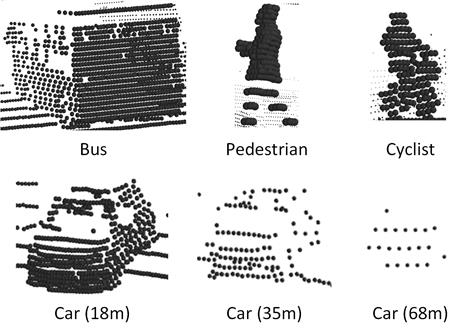
图3 不同类别与不同距离下的点云形态
➢ 实验结果
为了进一步增强半监督3D检测的性能,该工作针对点云数据的特性,进一步提出了有效的数据增强方式,如目标点云稀疏增强、真实目标重采样、点云数据随机翻转、旋转和平移等。该工作也获得了ICCV 2021 Workshop SSLAD Track 2 - 3D 目标检测挑战赛的第二名(如图4证书所示),同时也是所有单模型方法的第一名。
图4 ICCV 2021 Workshop SSLAD Track 2 - 3D 目标检测挑战赛证书。