智能车实验室钱烨强博士在智能车领域顶级期刊IEEE Transactions on Intelligent Vehicles (简称T-IV)上发表长文Hy-Seg: A Hybrid Method for Ground Segmentation Using Point Clouds。
![Qian Y, Wang X, Chen Z, et al. Hy-Seg: A Hybrid Method for Ground Segmentation Using Point Clouds[J]. IEEE Transactions on Intelligent Vehicles, 2022. DOI:10.1109/TIV.2022.3187008](/__local/6/8B/17/2E061790691A0D529BFF1661A91_18952FA1_1E0D.png)

➢ 研究背景与意义
实时准确的地面分割是智能车辆的关键技术。一方面,获取车辆的可行驶区域信息,对后续的导航和控制具有重要意义。另一方面,有利于提高目标检测和分割的性能。图1展示了基于点云数据的地面分割的效果图。当前基于激光雷达点云数据的地面分割技术主要分为四类,分别是基于栅格的方法、基于搜索的方法、基于拟合的方法和基于学习的方法。基于栅格和基于搜索的方法几乎可以将所有真实的地面点分割为地面,但车辆和树木上的一些点也被分割为地面。这导致后续目标检测用于分割和识别的点不足。基于拟合的方法严重依赖于种子点和模型的选择。因此,该方法对不同场景的适应性较差。基于学习的方法需要大量的计算资源和数据资源,难以快速部署到智能汽车上。
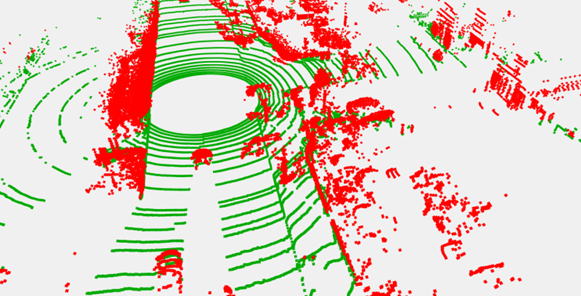
图1 地面分割示意图
➢ 本文工作
考虑到网格图可以快速减少点云数量,基于搜索的方法可以准确识别障碍物的点云,拟合模型对地面各种坡度的拟合能力强。 我们将这些想法结合到一个新的框架中。 该方法称为Hy-Seg,如图2所示。具体来说,首先将3D点云用极坐标网格图表示,每个网格中的最低高度点用于表示地面属性 网格,可以大大减少点云数据量,提高算法效率。 然后,利用相邻两个点的射线梯度在每个网格中搜索候选地面点,从而去除障碍点,例如车辆和树木上的点。 最后,应用基于随机样本一致性的多项式拟合方法(RANSAC)对每个分段中的地面进行建模,并使用拟合模型对原始3D点云进行分段。
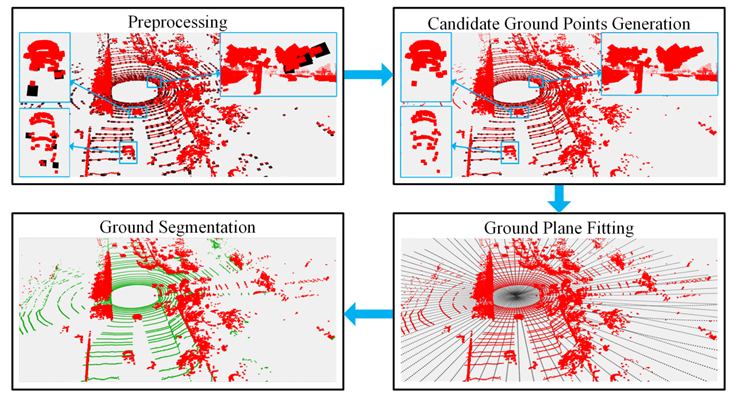
图2 本文所提出的算法框架图
➢ 实验结果
在SemanticKITTI数据集上,本文所提出的方法与基于栅格的方法、基于搜索的方法、基于拟合的方法和基于学习的方法进行对比,我们的方法具有较高的地面分割的准确度,且能够以53HZ的高速度进行处理。
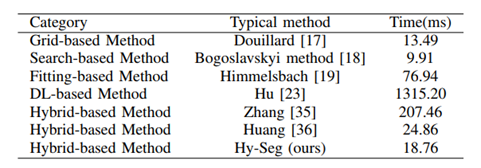
表1 地面分割精确度对比

表2 不同算法运行速度对比