智能车实验室博士生房素素在智能交通领域顶级期刊IEEE Transactions on Intelligent Transportation Systems (简称T-ITS)上发表长文LiDAR SLAM based Multi-Vehicle Cooperative Localization Using Iterated Split CIF。
![Fang S, Li H, Yang M. LiDAR SLAM Based Multivehicle Cooperative Localization Using Iterated Split CIF[J]. IEEE Transactions on Intelligent Transportation Systems, 2022. DOI:10.1109/TITS.2022.3174479](/__local/7/1F/61/5D39479CED52AD4B39247B90256_A7896C70_2190.png)
➢ 研究背景与意义
未知环境中的高精度定位是自动驾驶汽车安全驾驶的基本要求。与单车定位相比,协作定位在精度、容错性和灵活性方面具有明显优势,在协作定位中,自车通过融合来自传感器的多源数据和多辆车同时运行时可用的额外共享信息来估计车辆姿态以增强自车定位,一般策略如下图所示。
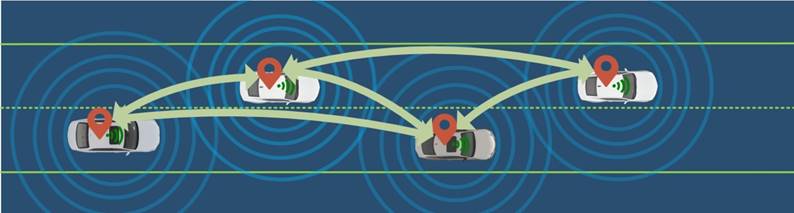
图1 通过激光雷达(LiDAR)感知和无线通信获取来自邻车的额外共享信息以增强自车定位的去中心化多车协作定位一般策略
虽然协作定位优势明显,但在数据融合过程中,需要考虑不止一种使状态估计精度下降的错误数据源,例如估计间相关性、控制量和观测值中的异常值等,并且在数据融合过程中,它们可能同时存在。以前的工作通常一次评估一种错误数据源类型下的状态估计性能,又或者现有方法在上述相关性和异常值都存在的一些极端情况下表现不佳。
➢ 本文工作
本文提出了一种基于去中心化框架下的精确且鲁棒的迭代分离协方差交叉滤波器(Iterated Split CIF)的协作定位策略,该策略可以保证各种错误类型的数据源同时存在时的性能。此外,我们将协作式车辆间相对姿态估计抽象为点云配准问题,采用有效的点云配准方法,利用来自相邻车辆的相互共享信息来获得协作相对姿态估计。最后,基于 CARLA 模拟器的多项对比实验充分证明了使用提出的基于Iterated Split CIF的多车协作定位在准确性、鲁棒性和效率方面的潜力和优势。具体的协作定位策略如下图所示:
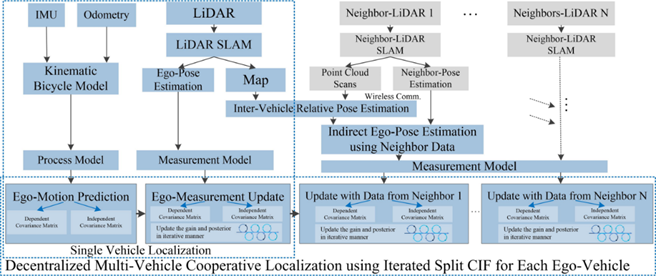
图2 本文提出的基于Iterated Split CIF的去中心化多车协作定位策略
在此多车协作定位任务中,每辆车基于自车运动传感器和激光雷达执行自己的单车定位任务。同时,每辆车仅与其相邻车辆交互(感知和车辆通信),以使用共享的车辆位姿和局部地图来获得车辆间协作相对位姿估计,以增强自车定位结果。此外,Iterated Split CIF将状态估计的协方差拆分为依赖和独立的部分以处理潜在的相关性,同时以迭代的方式计算滤波器增益和一些后验估计以处理异常值,最终得到准确鲁棒的协作定位结果。
➢ 实验结果
我们在常见的CARLA仿真器中的城市道路和高速公路环境中分别设置了几辆具有相似行驶方向和路线的车辆。 他们通过感知传感器进行交互感知,并通过无线通信与前后相邻的车辆共享信息,以使用上架构所示的方法进行协作定位。 具体的,我们在不同的噪声环境下(高斯白噪声和有色噪声)设置了两组主要的对比实验,每组实验都对五种方法进行对比,实验结果如下所示。

图3常见城市道路中高斯白噪声下的三辆车位姿估计误差。其中,SL表示单车定位;EKF-CL表示基于扩展卡尔曼滤波的协作定位给;IEKF-CL表示基于迭代扩展卡尔曼滤波的协作定位;SCIF-CL表示基于分离协方差交叉滤波的协作定位;以及ISCIF-CL表示提出的基于迭代分离协方差交叉滤波的协作定位方法。

图4常见城市道路中有色噪声下的三辆车位姿估计误差。其中,SL表示单车定位;EKF-CL表示基于扩展卡尔曼滤波的协作定位给;IEKF-CL表示基于迭代扩展卡尔曼滤波的协作定位;SCIF-CL表示基于分离协方差交叉滤波的协作定位;以及ISCIF-CL表示提出的基于迭代分离协方差交叉滤波的协作定位方法。
我们还验证了在当控制量和观测值中存在异常值时提出的方法的鲁棒性。其中,将作为运动预测的控制变量输入之一的速度在300s-315s内增加20km/h后恢复以模拟车轮打滑的异常情况。另外,我们在 400s-415s 内将速度设置为 0km/h,以模拟另一种异常情况,即车轮抱死。实验结果如图5所示(以车辆1为例)。此外,为了研究测量异常值对所提出方法的定位性能的影响,通过在观测值中添加异常值(在自车测量更新中测量值在300s-315 秒内受到巨大偏差的污染;)以模拟传感器故障。另外,在使用来自相邻车辆的数据进行更新的过程中的观测值也可能会受到由异常车辆通信引起的巨大偏差的污染。我们通过在 500s-515s 内为共享相邻车辆的位姿添加异常值来模拟这种异常情况。具体实验结果如图6所示(以车辆2为例)。
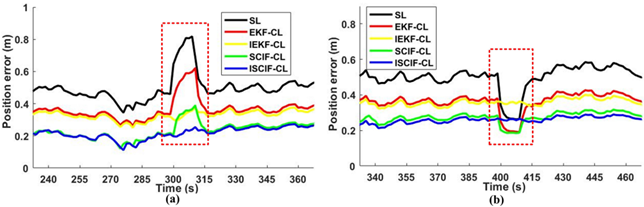
图5 异常情况下车辆定位误差分析(以车辆1为例)。(a)行驶过程中在300s-315s 内出现车轮滑移。 (b)行驶过程中在 400s-415s 内出现车轮抱死异常情况。
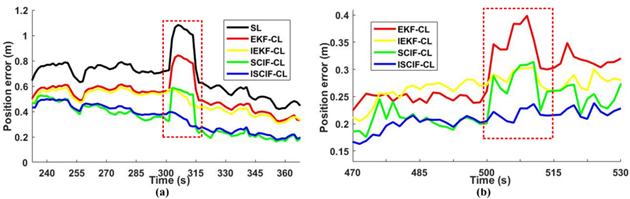
图6 异常情况下车辆定位误差分析(以车辆2为例)。(a)行驶过程中在 300s-315s 内的自车测量值受到污染。 (b)行驶过程中在500s-515s 内得到的共享的相邻车辆位姿被污染 。
此外,我们还对通信延迟进行了定量评估分析并提供了几种处理通信延迟情况的方法。各类实验结果可以直观地证明,所提出的去中心化协作定位解决方案即使在非线性和非高斯户外场景中也能保证其准确性和鲁棒性。在这些比较研究中,我们以三辆车为例来说明我们提出的合作定位策略的优势。值得注意的是,这并不意味着该方法只适用于三辆车。我们还测试了几种不同场景下更多协作车辆的情况。在各种场景和更多车辆下测试的所有实验结果都表明,所提出的方法可以执行准确和鲁棒的协作定位性能。
综上,本文提出了一种基于 LiDAR SLAM 的去中心化多车协作定位解决方案,该解决方案使用Iterated Split CIF数据融合方法,即使在具有异常情况的复杂室外环境中,所提出的协作定位方法在车辆姿态估计方面也具有较高的准确性、鲁棒性和效率。此外,这种方法对于透视或增强现实技术的协作感知也很有价值,可以推广到数据融合应用的其他领域。该方法的局限性在于,虽然基于仿真的对比实验可以作为有价值的指导,但目前尚未在现实中体现,并且在所提出的算法中没有考虑更高的非线性情况,这将是未来工作的方向。同时,基于GPS的协作定位初始化比较简单,未来也可以探索基于LiDAR的全局初始定位。