智能车实验室博士生保罗(Rodrigo Gantier)在智能交通领域顶级期刊IEEE Transactions on Intelligent Transportation Systems (简称T-ITS)上发表长文Pedestrian Graph +: A Fast Pedestrian Crossing Prediction Model based on Graph Convolutional Networks,该模型提供实时行人过路预测,同时与其他模型相比轻量级,并且不会损失准确性。
![Cadena P R G, Qian Y, Wang C, et al. Pedestrian Graph+: A Fast Pedestrian Crossing Prediction Model Based on Graph Convolutional Networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2022. DOI:10.1109/TITS.2022.3173537](/__local/F/0C/AF/4B180EF30206D5403200EA1D855_0121C443_2430.png)
➢ 研究背景与意义
无人驾驶和驾驶辅助系统必须考虑到最脆弱的交通参与者,即行人。近年来,预测人行过马路的模型的准确率有所提高。然而,这是以增加计算成本和推理时间为代价的。为了解决这个问题,在本文工作中,分析了预测行人过路处最重要的特征,并优化了基于graph的神经网络。以5毫秒的推理时间和低计算成本实现最先进的结果(该模型可以在 Jetson Nano 中实现)。
➢ 本文工作
本工作分析了哪些特性对预测过马路有最大的影响,并且优化了网络模型。我们的神经网络在时间维度上有一个动态输入。这意味着该模型能够处理几乎任何大小的数据。这在首次识别行人时很有用。其他模型通过用零填充输入来解决这个问题。我们的神经模型是多模态的(multimodal)。它能够以有效的方式处理行人骨骼关节坐标、车辆(ego-vehicle)的速度和行人召回的图像(local context) 图1 显示了模型的输入和结构。
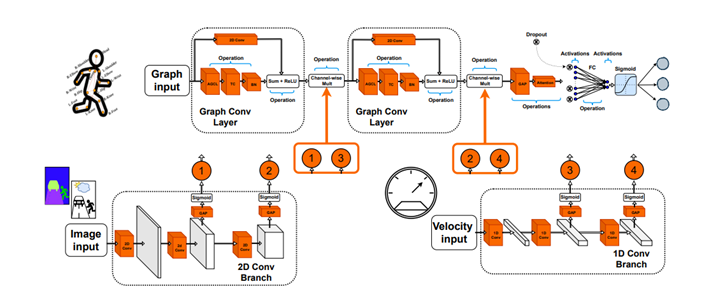
图1 本文方法的基本框架图
同样为了提高准确性,实施了一个模块来预测行人骨骼关节的未来位置。我们的另一个贡献是数据增强。由于我们的模型能够处理时间维度上的任何大小的数据,我们随机地对训练数据进行大数据处理。这样增加了我们模型的正确率,并且不会增加推理的计算成本。
➢ 实验结果
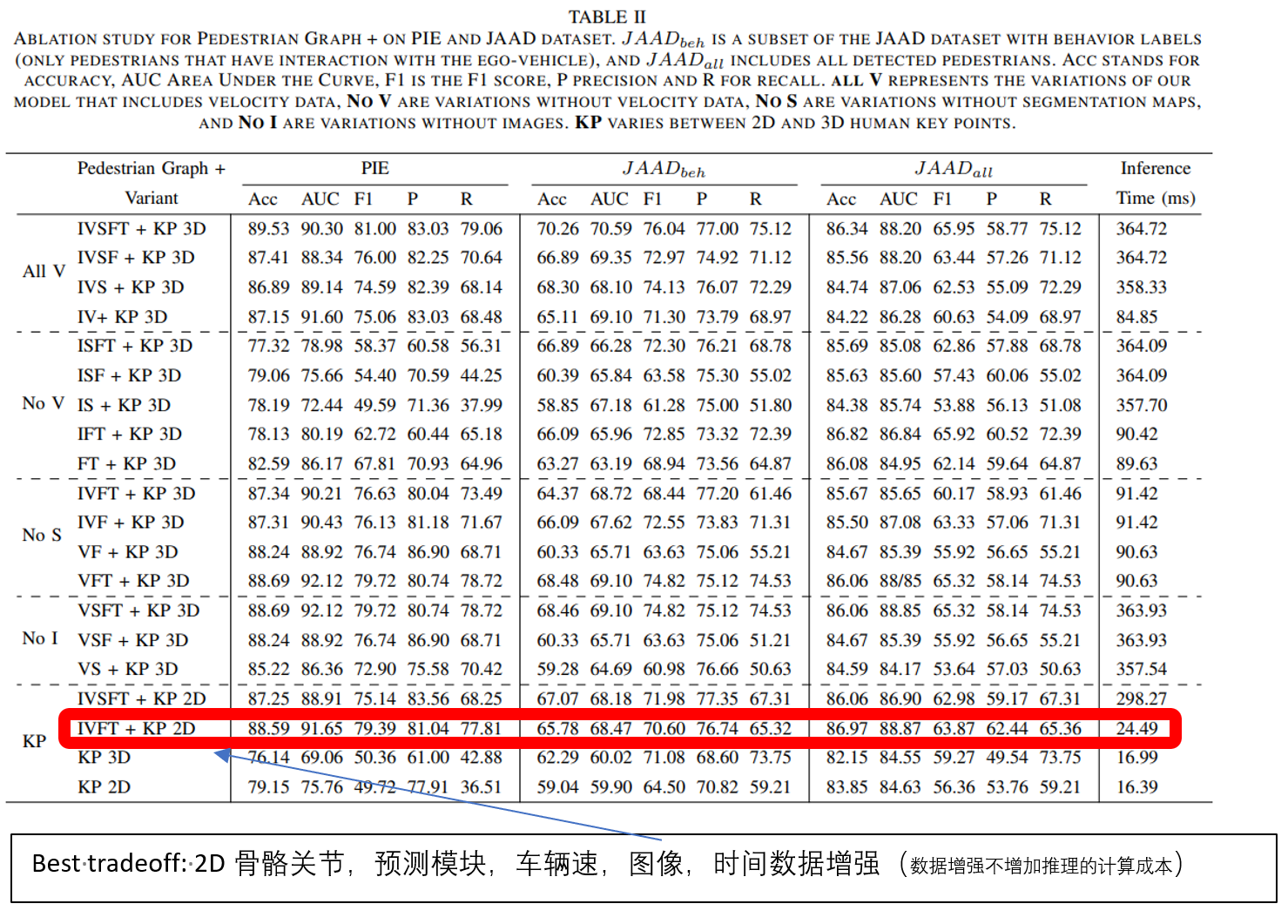
经过对所有数据的研究,得出的结论是,要拥有高效的模型并同时进行实时推理,贡献最大的特征是:人体二维骨骼关节,骨骼关节预测,车辆速度和数据增强。 其他数据(3D 人体关键点、语义分割图)虽然有助于准确性,但对推理时间有相当大的影响。
结果的可视化在bilibili和youtube
pedgraph+_哔哩哔哩_bilibili 
(648) Pedestrian Graph + - YouTube