智能车实验室李亮博士在智能车领域顶级期刊IEEE Transactions on Intelligent Vehicles (简称T-IV)上发表长文Robust Localization for Intelligent Vehicles Based on Compressed Road Scene Map in Urban Environments。
![Li L, Yang M, Li H, et al. Robust Localization for Intelligent Vehicles Based on Compressed Road Scene Map in Urban Environments[J]. IEEE Transactions on Intelligent Vehicles, 2022. DOI:10.1109/TIV.2022.3162845](/__local/E/C1/F1/E38EC417F0A0EDABB8AEFBBF958_920EB3E1_2378.png)

➢ 研究背景与意义
在无人车定位中,原始点云地图数据量过大,对车载设备的硬盘存储量是极大的挑战,并且基于原始点云匹配的算法计算量大,不容易满足实时性要求。针对这一问题,本文提出街景压缩地图方案,通过将三维点云向道路两侧压缩,巧妙设计了二维地图的生成、存储与匹配方法。所提出的算法首先将多帧点云拼接,生成更大范围内的三维稠密点云。然后滤除地面、杂乱点等对定位无关的信息。最后通过道路信息与车辆自身航位的推算,将滤波后的点云投影到路面两侧。对于地图匹配问题,申请人提出基于粒子滤波框架的标准化信息距离优化算法,实验结果表明,该算法匹配失败率低、匹配误差小,大幅提高了定位结果的鲁棒性。相比于传统的向地面投影的二维占据栅格图,街景压缩地图保留了更多道路两侧的特征信息与道路两侧的深度信息,特征更为丰富且典型。这对定位来说至关重要,降低了匹配难度,为解决机器人绑架(Robot kidnapping)问题提供了思路。
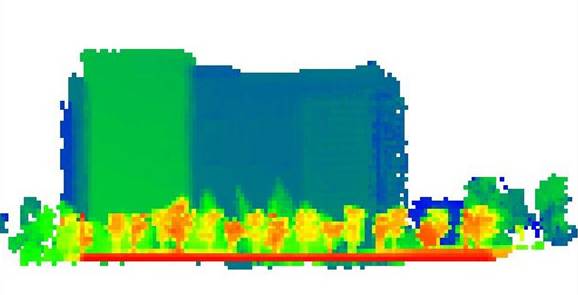
图1 街景压缩地图示意图
➢ 本文工作
本算法采用蒙特卡洛定位框架,在模型更新中融合车辆运动数据(由惯性装置以及轮速编码器提供),在观测更新中,利用改进ICP算法匹配实时数据与街景压缩地图,对误差进行校正,算法框架图如图2所示。

图2 本文所提出的算法框架图
➢ 实验结果
在KITTI数据集上,本文所提出的方法与传统的栅格图方法进行对比,验证了算法的精度与鲁棒性,如图3所示。
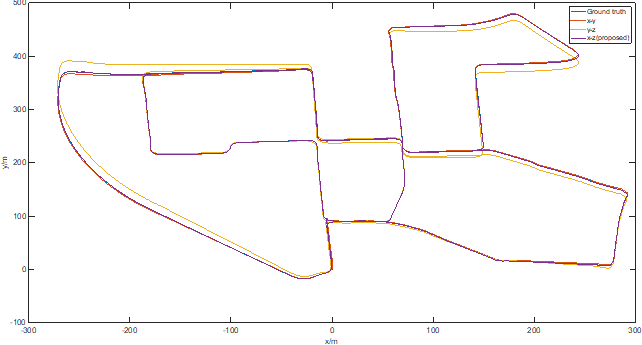
图3 本文所提出的方法与传统栅格图方法在KITTI数据集上的对比