智能车实验室博士生房素素在期刊IEEE Robotics and Automation Letters(简称RAL)上发表论文Inertial Navigation System based Vehicle Temporal Relative Localization with Split Covariance Intersection Filter。
![Fang S, Li H, Yang M, et al. Inertial Navigation System Based Vehicle Temporal Relative Localization With Split Covariance Intersection Filter[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 5270-5277.](/__local/D/F6/F4/B1CB251CCFC9EE86F0B4E8E198D_9428BA15_2180.png)
➢ 研究背景与意义
在自动驾驶车辆导航中,通常涉及一个基本过程,即相对于前一时刻的车辆位姿新息估计下一时刻的车辆位姿,我们将此过程称为时序相对定位(TRL)。准确可靠的 TRL 对于在自动驾驶汽车导航中发挥基础作用的车辆定位及建图中非常有价值。
实现TRL的一种常见方式是基于运动传感器的航位推算, 例如基于里程计的方法,基于惯性导航系统的方法以及基于视觉传感器的方法等。在自动驾驶车辆的定位导航应用中,惯性测量单元(IMU)是一种常用的运动传感器,它具有瞬时测量精度高的优点。在实际应用中,惯性导航系统(INS)通常不是单独使用,而是与一些运动传感器或系统集成在一起使用。
车辆时序相对定位中常见的基于运动传感器数据的航位推算依赖于广泛应用的三自由度 (3-DOF) 自行车运动模型,这类方法基于 INS 的 TRL,并应用车辆动力学的非完整约束来描述实际车辆的基本运动特性。然而,对于常见的斜坡道路(爬坡道路和倾斜的转弯道路),3-DOF运动模型的问题凸显出来。此模型不能描述其他自由度的车辆运动,如俯仰运动,以及在倾斜的道路上明显存在的车辆横滚或轮胎运动,这会导致车辆时序相对定位精度下降甚至错误定位。下图较为直观地描述了这一问题:
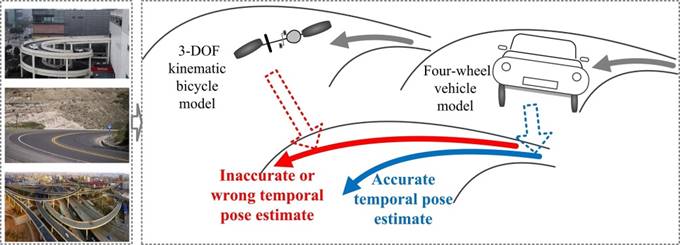
图1 应用不同车辆模型的常见斜坡道路的车辆时序相对定位
➢ 本文工作
为了增强基于惯性导航系统的车辆时序相对定位的性能,本文提出了一种九自由度 (9-DOF) 车辆动力学模型 (VDM) 作为 TRL 滤波过程的系统模型;它可以有效地表征车辆的俯仰和侧倾运动以及轮胎运动,尤其是在坡道场景中。具体的9-DOF车辆动力学模型如下图所示:
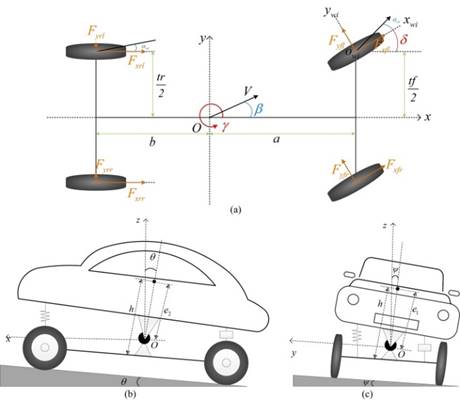
图2 (a) 车辆运动模型 (b)车辆俯仰运动 (c)车辆横滚运动 (具体字母代表含义请参照论文)
为了使定位系统具有更好的容错性,本文引入一个由一个主滤波器和两个局部滤波器组成的分布式融合框架来应用于多数据源融合以估计车辆位姿。本文使用分离协方差交叉滤波器(Split CIF)1来处理这种分布式融合机制中不可避免存在的未知的时序相关性。最终,通过真实场景的实车实验研究证明了该方法在准确性和鲁棒性方面的优势。本文提出的基于惯性导航系统的车辆时序相对定位系统如下图所示:
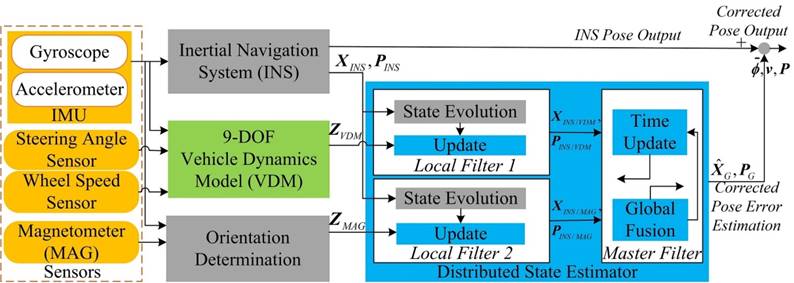
图3 本文提出的车辆时序相对定位策略
➢ 实验结果
为了验证本文提出的车辆时序相对定位方法的性能得到了增强,本文主要设计了两组对比实验和一个容错实验进行性能验证。其中,实验一是对增强惯性导航系统性能的三种方法的比较,比较的增强方法分别是:基于轮速传感器增强惯性导航系统的车辆时序相对定位(WSS_INS-TRL),基于3-DOF车辆模型增强惯性导航系统的车辆时序相对定位(3-DOF _INS-TRL),以及提出的基于9-DOF车辆动力学模型增强惯性导航系统的车辆时序相对定位(9-DOF_INS-TRL)。实验二是比较两种典型的融合策略(其他模块与提出的方法相同),即,常见的集中式卡尔曼滤波(CKF-TRL),联邦卡尔曼滤波(FKF-TRL),以及提出的分布式融合策略(DSCIF-TRL)。同时,本文还进行了在两种异常情况(车轮抱死和车轮打滑)下的容错性实验。实验平台、设备安装以及对比实验的测试路径下图所示:
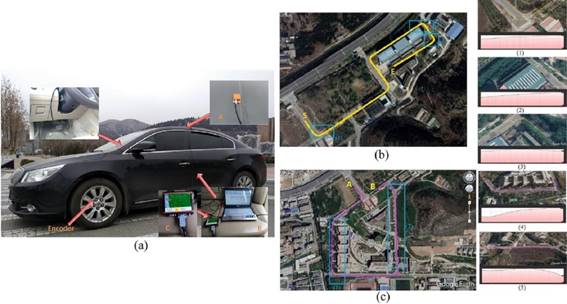
图4 (a) 实验平台(b)实验I中的测试路径。S和E代表起点和终点。 三个具体的斜坡场景用蓝色矩形框标注,高程信息在右侧三个子图(1)(2)(3)中显示(粉红色曲线表示地面高度变化)。 (c) 实验 II 中的测试路径。 A 和 B 代表起点和终点。 两个具体的坡段用蓝色矩形框标出,高程信息在右侧三个子图(4)和(5)中显示。
这里列举其中一组实验结果如下所示:
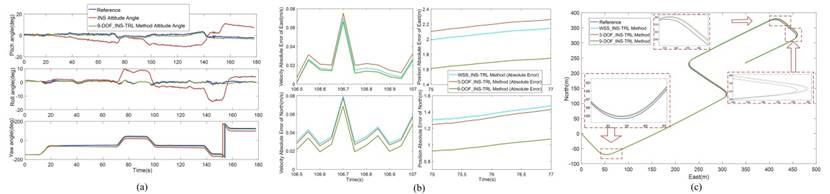
图 5 三种增强惯性导航系统方法(实验I)的位姿估计结果。 (a) 本文提出方法的姿态角估计。(b) 随机时间段内速度和位置的绝对误差。 (c) 斜坡道路的相对定位结果及细节图。
本文进行的异常情况下的容错实验结果如下所示:
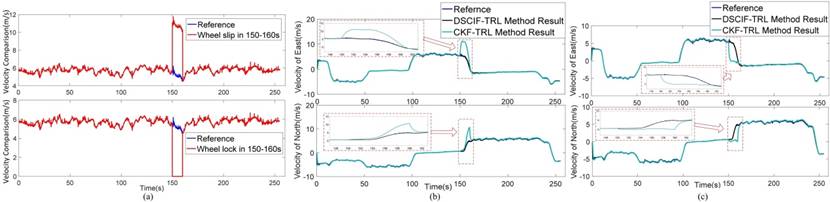
图6 容错性能实验的设计和结果。 (a) 异常条件下的车辆速度。 (这是两组实验,虽然异常情况设置在同一时间段,但它们不会同时发生。)(b)车轮打滑时(150-160 s)的速度对比及细节图展示。(c)车轮抱死时(150-160 s)的速度对比和细节展示。
在不同场景下的实验结果验证了所提出的方法可以为自动驾驶汽车在常见的斜坡道路上甚至在异常情况下提供高精度和鲁棒的时序车辆定位估计。此外,现实中存在更多不同的打滑失效情况,例如由于较高的速度或摩擦系数的变化引起的轮胎打滑或侧滑等,这可能会对所提出策略中车辆模型的输出产生影响。然而,如上文所述的方法论述中,车辆动力学模型为其中一个子滤波器提供观测量。如果其中一个子滤波器受到影响,另一个子滤波器仍然可以正常工作,因为它不受此类失效问题引起的输入变化的影响。综上所示,所提出的架构不仅在正常情况下具有定位精度和鲁棒性上的优势,在异常情况下仍然可以隔离故障并在短时间内恢复性能,保持定位精度。