智能车实验室袁伟博士在智能交通领域期刊IEEE Transactions on Intelligent Transportation Systems (简称T-ITS)上发表长文AGBM: An Adaptive Gradient Balanced Mechanism for the End-to-End Steering Estimation,该工作主要是解决基于学习的端对端决策模型在训练时遇到的数据不均衡问题。
![Yuan W, Zhuang H, Wang C, et al. AGBM: An Adaptive Gradient Balanced Mechanism for the End-to-End Steering Estimation[J]. IEEE Transactions on Intelligent Transportation Systems, 2022. DOI:10.1109/TITS.2022.3147248](/__local/A/C6/98/3C4B29FDCB05935ACBDF6A7B7A5_66AFFF9D_221D.png)
➢ 研究背景与意义
基于学习的模型通常对数据有很强依赖性,而在实际训练过程中,数据集中不可避免地存在场景分布不均衡的问题(图1)。通常情况下,解决训练数据不均衡的问题有两种方法:对高频出现的常见样本进行降采样;或者是构建代价敏感损失函数,提升学习难例样本时的学习权重。然而,当我们将端对端的决策任务视作高维的视觉信息回归到方向盘转角的分类任务时,因为“分类问题”有无限数量的类别,重复采样数据的操作将无效化。而过往研究中基于交叉熵的代价敏感损失函数也都是面向有限类别的分类任务的。因此,需要设计新的机制,改善模型在经历数据不均衡的训练后的表现。

图 1 五个数据集中,方向盘转角大小的分布情况有很大区别
➢ 本文工作
该工作分析了不均衡训练对深度回归模型的影响机理,设计了一种自适应梯度平衡机制 (Adaptive Gradient Balanced Mechanism, AGBM)。利用与方向盘转角最接近的拉普拉斯分布,将概率偏差作为损失函数的权重,从而实现了梯度的平衡化。
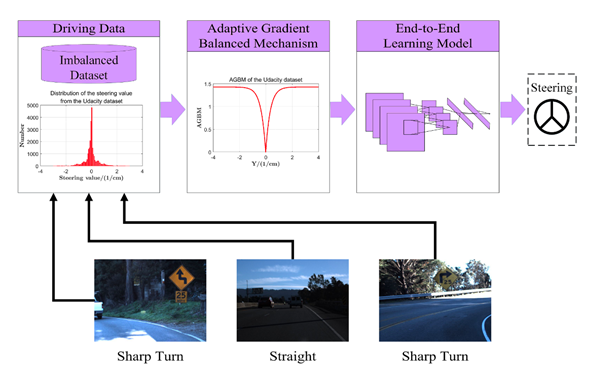
图 2 端对端决策模型的结构
➢ 实验结果
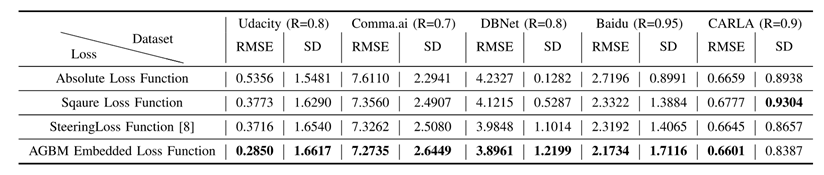
为了验证梯度均衡对模型表现带来的效果,论文对由不同数据集训练的采用其他损失函数的决策模型,和采用AGBM(含损失函数)的决策模型的表现进行了测试。采用了均方根误差RMSE和标准方差SD作为指标。可以看出,无论是在哪个数据集上,尤其是各个数据集的急转弯的场景下,采用AGBM机制的决策模型在预测方向盘转角的任务上都有更好的表现。

图 3 使用了AGBM的PilotNet对典型驾驶场景的方向转角预测效果
表 1 采用了AGBM(含损失函数)的决策模型和采用其他损失函数的决策模型在不同数据集上的表现比较
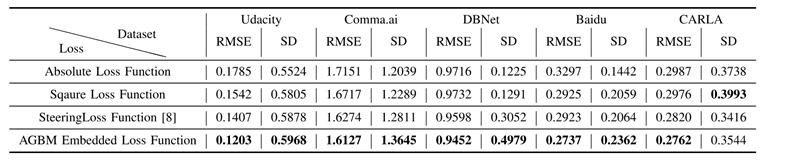
表 2 不同数据集急转弯场景下,AGBM(含损失函数)的决策模型和采用其他损失函数的决策模型的表现比较