智能车实验室博士生赵恒旺在期刊IEEE Robotics and Automation Letters(简称RAL)上发表论文G3DOA: Generalizable 3D Descriptor with Overlap Attention for Point Cloud Registration,该论文同时在2022 IEEE International Conference on Robotics and Automation(ICRA2022)会议上展示。
![Zhao H, Zhuang H, Wang C, et al. G3DOA: Generalizable 3D Descriptor With Overlap Attention for Point Cloud Registration[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2541-2548.](/__local/4/FA/73/2273DDFCF28205A235E1D6BB70C_FD64E5E5_1F10.png)
➢ 研究背景与意义
点云配准在机器人、自动驾驶等相关的应用中有重要作用,其中基于三维描述子的点云配准方法,对初始误差具有较高的鲁棒性,有较广的适用范围。早期人工设计的三维描述子虽然能保持旋转不变性,但是其对噪声和遮挡较为敏感。近年来,得益于深度学习强大的特征表达能力,研究者逐渐关注基于学习的三维描述子。现有基于学习的三维描述子,虽然在一些数据集上表现出较好的性能,但是其泛化性能较差,对数据的变化较为敏感,与实际应用还有一定距离。因此,该工作提出一种新的神经网络(G3DOA)来构建三维描述子,该网络同时学习可泛化的旋转不变三维描述子和其空间重叠概率,来提高三维描述子在不同环境中的泛化性能,旨在提升基于学习的三维描述子的泛化性与实用价值,如图1所示。
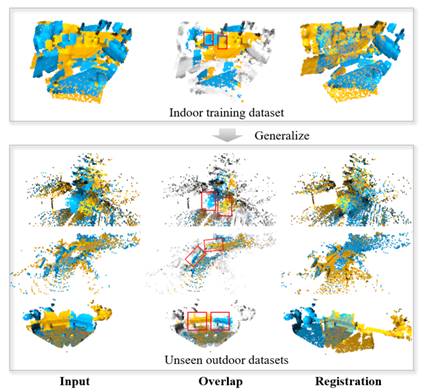
图1 G3DOA仅在室内数据集训练泛化到不同室外数据集的效果展示
➢ 本文工作
该工作提出的G3DOA网络框架如图2所示,它是一种孪生网络架构,使用具有共享权重的两个分支来处理点云对,以源点云(黄色)和目标点云(蓝色)作为输入,经过处理后,输出每个点云采样点的描述子和重叠分数。
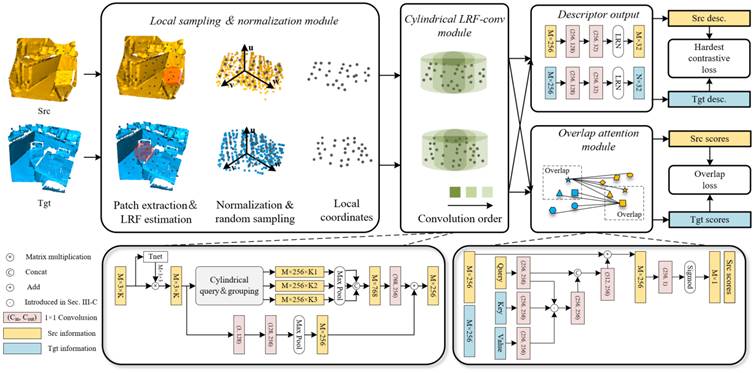
图2 G3DOA网络框架
该网络框架由四个主要模块组成:(1)局部采样和归一化模块将点云转换为旋转不变和尺度不变的表示,并通过随机采样减少点的数量;(2)局部参考系圆柱卷积模块利用多尺度的圆柱形体素和神经网络,学习可泛化且具有区分度的旋转不变特征;(3)重叠区域注意力模块提取两个点云特征编码之间的互上下文信息,并预测每个点的重叠分数,表示该点在两个点云重叠区域概率的大小;(4)描述符输出模块,将特征映射为32维的描述子,并对其进行归一化。
➢ 实验结果
为了验证描述子的泛化性,该工作在一个室内数据集(3DMatch)训练网络,在三个室外数据集(ETH、KITTI和SJTU-Mid100)测试。定性效果如图3所示,第一列为输入的点云对。第二列为使用t-SNE降维的描述子可视化,可以看到在不同的数据集的点云上,对应区域(红框)的颜色相似,非对应区域的颜色是具有区分度的,验证了描述符的泛化性、旋转不变性和可区分性。第三列为估计的重叠区域,其中彩色的点表示位于重叠区域的点,灰色点表示位于非重叠区域的点。第四列为使用描述子进行点云配准后的效果,第五列为真值。

图3 G3DOA在不同数据集的可视化结果
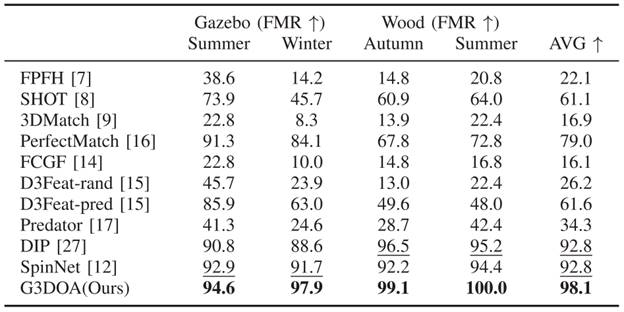
使用室内数据集3DMatch训练的模型,在室外ETH数据集测试的定量结果如表1所示,可以看出G3DOA相比其他方法具有更高的FMR,表现出较好的泛化性。
表1 从3DMatch数据集泛化到ETH数据集的定量结果
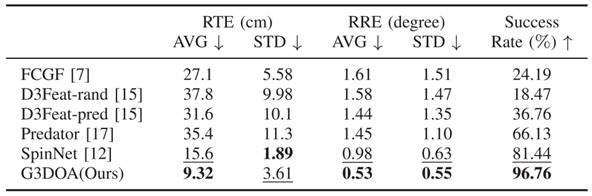
使用室内数据集3DMatch训练的模型,在室外KITTI数据集测试的定量结果如表2所示,可以看出使用G3DOA提取的描述子配准的点云,具有更高的精度和成功率,表现出较好的泛化性。
表2 从3DMatch数据集泛化到KITTI数据集的定量结果
该工作在英伟达1080TI GPU上,平均提取每个描述子的时间为2.93毫秒,其中预处理的时间为2.40毫秒,网络推理时间为0.53毫秒,表现出了较好的时间效率,如表3所示。
表3 运行时间分析
