2020年4月3日,上海交通大学智能车实验室提出一种基于地图增强的自车道检测方法,并在自动驾驶领域国际著名的KITTI数据集进行评测。其中,车道估计评测任务中取得了93.56%的MaxF,行为估计评测任务中取得了97.55%的HR-30,获得2项冠军。
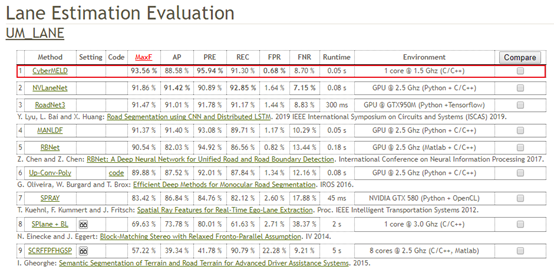

自车道检测是自动驾驶系统中最重要的任务之一,传统的方法容易受到车道标记磨损、光照变化等因素的影响。针对这一问题,2018级硕士研究生王晓亮提出了一种基于地图增强的自车道检测方法。通过探索数字地图中包含的丰富几何、语义信息,提高在各种复杂场景中的检测性能,并降低计算量。

KITTI由德国卡尔斯鲁厄理工学院KIT和丰田美国技术研究院TTI联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。数据集用于评测立体匹配(stereo)、光流(flow)、场景流(sceneflow)、视觉里程计(visual odometry)、物体检测(object detection)和跟踪(tracking)、道路分割(road)、语义分割(semantics)等计算机视觉技术的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中多包含15辆车和30个行人,且存在不同程度的遮挡与截断。本次智能车实验室参加的是道路分割评测。