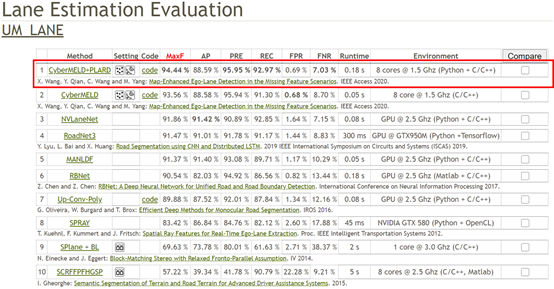
2020年6月20日,上海交通大学智能车实验室对提出的基于地图增强的自车道检测算法进行升级并开源。通过结合“PLARD”道路分割方法,在KITTI数据集车道估计评测任务中取得了94.44%的MaxF,刷新了之前93.56%的记录。目前,该方法对应的论文《Map-Enhanced Ego-Lane Detection in the Missing Feature Scenarios》已被IEEE期刊录用并在线发表,对应代码可通过Github进行访问。
代码下载:https://github.com/xiaoliangabc/cyber_meld
论文下载:https://ieeexplore.ieee.org/document/9110871
论文引用:X. Wang, Y. Qian, C. Wang and M. Yang, "Map-Enhanced Ego-Lane Detection in the Missing Feature Scenarios," in IEEE Access, vol. 8, pp. 107958-107968, 2020, doi: 10.1109/ACCESS.2020.3000777.
KITTI由德国卡尔斯鲁厄理工学院KIT和丰田美国技术研究院TTI联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。数据集用于评测立体匹配(stereo)、光流(flow)、场景流(sceneflow)、视觉里程计(visual odometry)、物体检测(object detection)和跟踪(tracking)、道路分割(road)、语义分割(semantics)等计算机视觉技术的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中多包含15辆车和30个行人,且存在不同程度的遮挡与截断。本次智能车实验室参加的是道路分割评测。