2018年11月16-18日,第十届中国智能车未来挑战赛在江苏常熟成功举行,本届比赛吸引了来自高校、科研机构和企业的27支车队报名参赛。本届比赛分为真实道路环境测试(含城市道路、城郊道路和高架快速道路)、复杂环境认知水平能力离线测试两部分。其中离线测试包括“道路区域人员监测”、“交通信号检测”、“前方车辆位置监测”、“车道偏离监测”四项测试。21支车队参加真实道路环境测试,22支车队参加离线测试。上海交通大学智能车实验室CybberTiggo代表队参加了全部比赛项目,并取得了离线比赛冠军以及高架道路第四名的优异成绩。

钱烨强同学代表实验室领奖
与往届比赛相比,本次比赛给了大家新的挑战:首次开展有人驾驶与无人驾驶混行测试验证(多辆无人车与多辆有人驾驶车辆交互);首次引入语义拓扑地图,开展无人车自然交互导航应用测试;首次以无人驾驶出行服务为背景,全面验证无人驾驶商业化应用的技术成熟度。
在16日的离线比赛中,凭借实验室在目标检测方面的多年积累,智能车实验室留学生保罗同学的检测算法获得道路区域人员监测比赛第一名。值得一提的是,保罗同学在比赛期间身体不适,被诊断为胆囊结石,为了不影响比赛,保罗同学坚持比赛结束再接受治疗,最终取得了比赛冠军。保罗同学的这种精神让比赛现场的各位同学深受鼓舞。
保罗同学领奖
高架比赛中,回程路段位于高架之下,基本无GPS定位信号,是本项比赛中的难点。CybberTiggo凭借算法的稳定表现,顺利完成了高架下无GPS路段、上下匝道、管制路段、故障车辆、真实车流在内的各项任务,最终取得第四名的成绩。

高架比赛实况
城乡道路比赛当天,天灰蒙蒙下着小雨,室外温度很低,轮到CybberTiggo发车时,雨势突然变大,让在场所有参赛队员措手不及。在比赛过程中,由于天气原因,造成了前挡风玻璃起雾的情况,对视觉检测造成了不小的干扰。最终,CybberTiggo有惊无险的完成了比赛项目。

发车准备
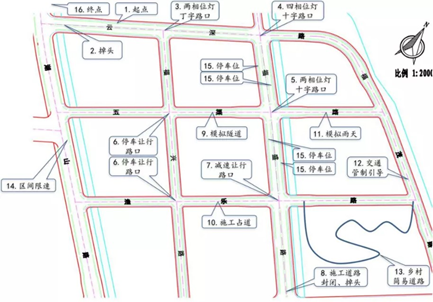
比赛任务
CybberTiggo是智能车实验室多年的研究成果,集成了实验室在认知计算、机器学习、计算机视觉、定位与导航等领域取得的各项成就,多次参加无人驾驶各类比赛,取得了不俗成绩。

全体参赛队员合影