国家自然科学基金(National Natural Science Foundation of China) |

| 城市复杂交通场景下基于端到端架构的车辆自主跟驰方法研究
Research on Autonomous Vehicle Following Method Based on End-to-End Architecture in Complex Urban Traffic Scenarios l国家自然科学基金面上项目(62573289)
National Natural Science Foundation of China(62573289) lPI: Prof. Ming YANG l01/2026–12/2029 |

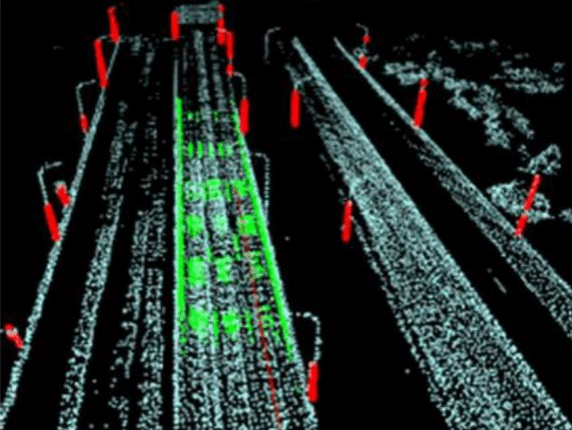
| 面向随动激光雷达的点云运动畸变校正方法研究
Research on Point Cloud Motion Distortion Correction Method for Gimbal LiDAR l国家自然科学基金面上项目(62573295)
National Natural Science Foundation of China(62573295) lPI: Dr. Hanyang ZHUANG l01/2026–12/2029 |
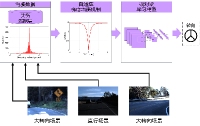
| 基于光学膨胀的智能车碰撞预测方法研究
Research on Collision Prediction Method for Intelligent Vehicles Based on Optical Expansion l国家自然科学基金面上项目(62473253)
National Natural Science Foundation of China(62473253) lPI: Associate Prof. Yeqiang QIAN l01/2025–12/2028 |
| 基于众包数据的城市大规模街景三维重建及神经渲染
Urban large-scale street view 3D reconstruction and neural rendering based on crowd-sourced data l国家自然科学基金青年项目(62403312)
National Natural Science Foundation of China(62403312) lPI: Associate Prof. Tong QIN l01/2025–12/2027 |
| 基于场景归纳的自动驾驶决策系统的高泛化性策略研究
Research on High-generalization Policies for Autonomous Driving Decision Systems Based on Scene Induction l国家自然科学基金青年项目(52402504)
National Natural Science Foundation of China(52402504) lPI: Assistant Prof. Songan ZHANG l01/2025–12/2027 |
| 基于全景分割的智能车辆感知决策一体化方法研究
Research on Panoptic Segmentation based Integration Method of Perception and Decision for Intelligent Vehicles l国家自然科学基金面上项目(62173228)
National Natural Science Foundation of China(62173228) lPI: Prof. Ming YANG l01/2022–12/2025
|
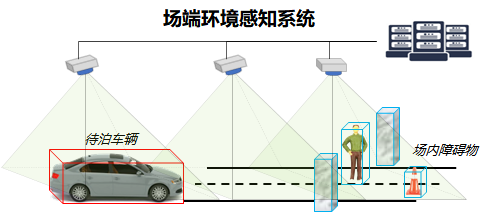
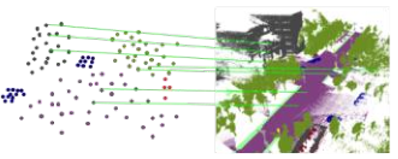
| 面向室内自主代客泊车的场端环境感知方法研究
Infrastructure-based Environmental Perception for Indoor Automated Valet Parking l国家自然科学基金青年项目(62203294)
National Natural Science Foundation of China(62203294) lPI: Dr. Hanyang ZHUANG l01/2023–12/2025
|

| 基于虚实迁移的智能车辆端对端学习方法研究
Research on End-to-End Learning Method of Intelligent Vehicle based on Virtual-Real Transfer l国家自然科学基金青年项目(62203301)
National Natural Science Foundation of China(62203301) lPI: Dr. Wei YUAN l01/2023–12/2025 |
| 动态干扰环境下园区无人驾驶可靠定位和场景理解方法研究与验证
Research and verification of reliable localization and scene understanding for autonomous driving under enclosed scenario with dynamic disturbance l国家自然科学基金联合基金项目-北京 (U22A20100)
National Natural Science Foundation of China(U22A20100) lPI: Prof. Ming YANG l01/2023–12/2026 |
| 智能车定位地图匹配方法中的交叉注意力机制研究
Research on Cross-Attention Mechanism in Map Matching based Self-Localization for Intelligent Vehicle l国家自然科学基金面上项目(62373250)
National Natural Science Foundation of China(62373250) lPI: Associate Prof. Chunxiang WANG l01/2024–12/2027
|
|
|