国家自然科学基金(National Natural Science Foundation of China) |
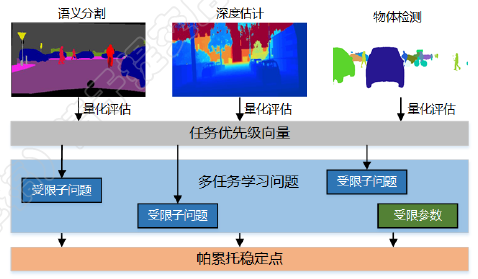
| 智能驾驶环境感知的多任务学习方法研究
Research on Multi-task Learning Method for Environment Perception in Intelligent Driving l国家自然科学基金青年项目(62103261)
National Natural Science Foundation of China(62103261) lPI: Dr. Yeqiang QIAN l01/2022–12/2024
|
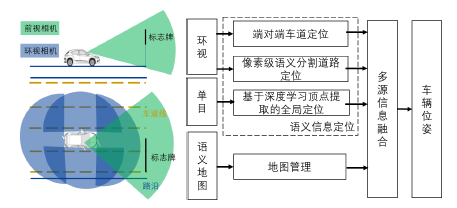
| 面向复杂遮挡环境的车辆视觉自定位方法研究
The Research of Vehicle Vision Self-localization for Complex Occlusion Environment l国家自然科学基金面上项目(61873165)
National Natural Science Foundation of China(61873165) lPI: Prof. Chunxiang WANG l01/2019–12/2022
|
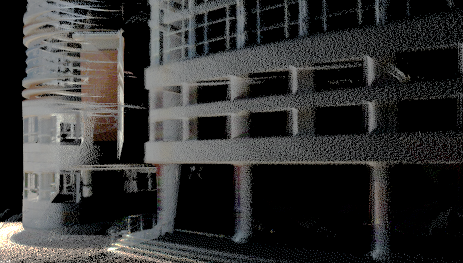
| 基于语义点云的智能汽车环境感知与建模
Semantic Point Cloud based on Environment Perception and Modeling for Intelligent Vehicles l国家自然科学基金联合基金项目-中国汽车产业创新发展基金(U1764264)
National Natural Science Foundation of China(U1764264) lPI: Prof. Ming YANG l01/2018 – 12/2021 |
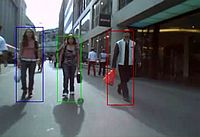
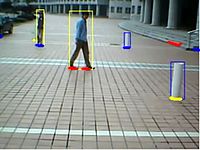
| 面向城区综合环境的行人检测和意图分析关键技术研究
Key Technique Research of Pedestrian Detection and Intention Analysis Focusing on Urban Environment l国家自然科学基金重大研究计划培育项目(91420101)
National Natural Science Foundation of China (91420101) lPI: Prof. Ming YANG l01/2015-12/2017 |
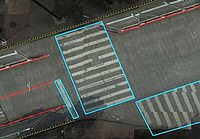
| 自主驾驶车辆关键技术与集成验证平台(高精细地图制作)
HDMap Generation for Autonomous Vehicles l国家自然科学基金重大研究计划集成项目(91220301)
National Natural Science Foundation of China (91220301) lPI@SJTU: Prof. Ming YANG l09/2013 – 12/2017 |
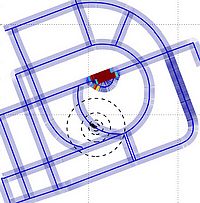
| GPS失效区域车辆定位方法研究
Research on Vehicle Localization during GPS Outage l国家自然科学基金面上项目(61174178)
National Natural Science Foundation of China(61174178) lPI: Prof. Ming YANG l01/2012-12/2015 |
| 混合交通环境下行人安全状态识别与预警技术研究
Research on Pedestrian Safety State Recognition and Early Warning under Mixed Traffic Conditions l国家自然科学基金面上项目(51178268)
The National Natural Science Foundation of China(51178268) lPI: Prof. Chunxiang WANG l01/2012–12/2015 |

| 基于多缩微车的智能交通系统仿真与控制方法研究
Model-car based Simulation and Control of Intelligent Transportation System (MicroIV) l国家自然科学基金重大研究计划培育项目(91120018)
National Natural Science Foundation of China (91120018) lPI: Prof. Ming YANG l01/2012 – 12/2014 |

| 面向城区综合环境的无人驾驶车辆平台及关键技术研究
The key technologies and platforms for unmanned vehicles in urban environment (CyberTiggo) l国家自然科学基金重大研究计划培育项目(91120002)
National Natural Science Foundation of China (91120002) lCo-PI: Prof. Chunxiang WANG l01/2012 -12/2014 |
中国博士后科学基金(China Postdoctoral Science Foundation) |
| 面向无人驾驶3D目标检测的多源异构数据融合方法研究 l第68批中国博士后科学基金(2020N681301)
China Postdoctoral Science Foundation(2020N681301) lPI: Dr. Yeqiang QIAN l11/2020–06/2022
|
| 颠簸路况下无人车多目标跟踪算法研究 l第66批中国博士后科学基金(2019M661510)
China Postdoctoral Science Foundation(2019M661510) lPI: Dr. Huijie ZHU l11/2019 – 12/2020 |